这门课算是普及知识的课程,并不能算作算法研究和提高编程技能的课程,而且更多的是理解什么是RL,PARL如何使用,做fine-tuning和dnn修改的工作。其实如果能理解PL和熟悉PARL使用,已经足够这门课的价值了。
在人工智能火热发展的时代,机器学习作为有效的实现方式,其分支也在百家争鸣百花齐放。曾经的BAT在经过www、web2.0、mobile的洗礼后,来到新的战场——AI。
Baidu作为曾经的B,在www、web2.0时代曾拔得头筹,但在mobile时代一蹶不振,未能突破AT的包围,被ByteDance替代。在AI如火如荼的今天,Baidu顺势发力,希望能借AI的东风重新回高光时刻。
因此Baidu开发了一系列机器学习的项目,包括核心库PaddlePaddle(飞桨)、学习系统AIStudio、以及数据集和模型库等等。当然,官方文档和培训课程也是必不可少的,99.9%的(只有一个企业级培训是收费的)课程是免费的,还有丰富的物质奖励。
偶然的机会(我也忘了是怎么知道的)获得PARL强化学习的免费学习机会,于是开始了知道我不知道PARL的历程。
一、课程预习中的知识点
1. 新手入门第一课-什么是深度学习?
- 人工智能是计算机科学的一个分支,研究计算机中智能行为的仿真。
- 机器学习是实现人工智能的一种手段,也是目前被认为比较有效的实现人工智能的手段
- 深度学习是一种机器学习方法 , 它允许我们训练人工智能来预测输出,给定一组输入(指传入或传出计算机的信息)
- 神经网络结构
- 梯度下降法
- 神经网络的小例子
2.新手入门第二课-必备数学知识
理论是武器,没有武器怎么打仗
3.新手入门第三课-Python快速入门
Python是门非常容易学的语言,但不是最佳编程入门语言,却是实现机器学习的最佳语言
4.新手入门第四课-PaddlePaddle快速入门
PaddlePaddle是Baidu的深度学习框架,核心框架,类似Tensorflow/Pytorch
5. AI Studio基本操作-Notebook篇
AI Studio Notebook蛮强大的,后端有服务器支持,免费的GPU可以薅
二、PARL强化学习公开课Lesson1
强化学习(英语:Reinforcement learning,简称RL)是机器学习中的一个领域,强调如何基于环境而行动,以取得最大化的预期利益。
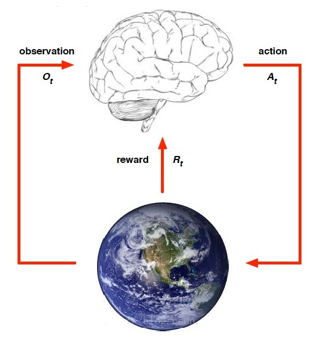
核心思想:智能体agent在环境environment中学习,根据环境的状态state(或观测到的observation),执行动作action,并根据环境的反馈 reward(奖励)来指导更好的动作。
下面这个图是RL的精髓,最后有个小例子,真的很有意思。
强化学习与监督学习的区别:
- 强化学习、监督学习、非监督学习是机器学习里的三个不同的领域,都跟深度学习有交集。
- 监督学习寻找输入到输出之间的映射,比如分类和回归问题。
- 非监督学习主要寻找数据之间的隐藏关系,比如聚类问题。
- 强化学习则需要在与环境的交互中学习和寻找最佳决策方案。
- 监督学习处理认知问题,强化学习处理决策问题。
三、基于表格型方法求解RL
PARL强化学习公开课 Lesson2_Sarsa
Sarsa全称是state-action-reward-state’-action’,目的是学习特定的state下,特定action的价值Q,最终建立和优化一个Q表格,以state为行,action为列,根据与环境交互得到的reward来更新Q表格,更新公式为:

Sarsa在训练中为了更好的探索环境,采用ε-greedy方式来训练,有一定概率随机选择动作输出。
PARL强化学习公开课Lesson2_Q_learning
- Q-learning也是采用Q表格的方式存储Q值(状态动作价值),决策部分与Sarsa是一样的,采用ε-greedy方式增加探索。
- Q-learning跟Sarsa不一样的地方是更新Q表格的方式。
- Sarsa是on-policy的更新方式,先做出动作再更新。
- Q-learning是off-policy的更新方式,更新learn()时无需获取下一步实际做出的动作next_action,并假设下一步动作是取最大Q值的动作。
Q-learning的更新公式为:

四、基于神经网络方法求解RL
PARL强化学习公开课Lesson3_DQN
上节课介绍的表格型方法存储的状态数量有限,当面对围棋或机器人控制这类有数不清的状态的环境时,表格型方法在存储和查找效率上都受局限,DQN的提出解决了这一局限,使用神经网络来近似替代Q表格。
本质上DQN还是一个Q-learning算法,更新方式一致。为了更好的探索环境,同样的也采用ε-greedy方法训练。
在Q-learning的基础上,DQN提出了两个技巧使得Q网络的更新迭代更稳定。
- 经验回放 Experience Replay:主要解决样本关联性和利用效率的问题。使用一个经验池存储多条经验s,a,r,s’,再从中随机抽取一批数据送去训练。
- 固定Q目标 Fixed-Q-Target:主要解决算法训练不稳定的问题。复制一个和原来Q网络结构一样的Target Q网络,用于计算Q目标值。
五、基于策略梯度求解RL
策略梯度方法求解RL——Policy Gradient
1. Policy Gradient简介
在强化学习中,有两大类方法,一种基于值(Value-based),一种基于策略(Policy-based)
- Value-based的算法的典型代表为Q-learning和SARSA,将Q函数优化到最优,再根据Q函数取最优策略。
- Policy-based的算法的典型代表为Policy Gradient,直接优化策略函数。
采用神经网络拟合策略函数,需计算策略梯度用于优化策略网络。
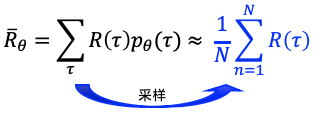
优化的目标是在策略π(s,a)的期望回报:所有的轨迹获得的回报R与对应的轨迹发生概率p的加权和,当N足够大时,可通过采样N个Episode求平均的方式近似表达。
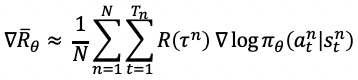
优化目标对参数θ求导后得到策略梯度:
2. Policy Gradient实践——REINFORCE算法
使用REINFORCE解决 连续控制版本的CartPole问题,向小车提供推力使得车上的摆杆倒立起来。
六、连续动作空间上求解RL
PARL强化学习公开课Lesson5_DDPG
1. DDPG简介
- DDPG的提出动机其实是为了让DQN可以扩展到连续的动作空间。
- DDPG借鉴了DQN的两个技巧:经验回放 和 固定Q网络。
- DDPG使用策略网络直接输出确定性动作。
- DDPG使用了Actor-Critic的架构。
2. DDPG实践
使用DDPG解决连续控制版本的CartPole问题,给小车一个力(连续量)使得车上的摆杆倒立起来。